.png)

 ВИИ-МОПНА-01")
 ВИИ-МОПНА-01")
 ВИИ-МОПНА-01")
 ВИИ-МОПНА-01")
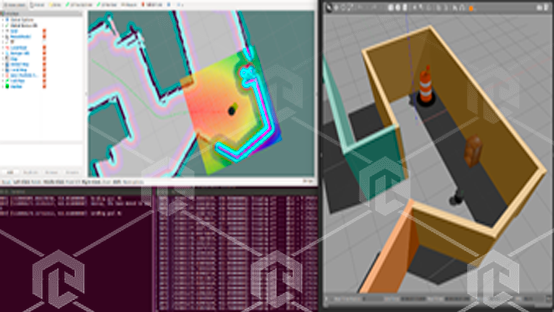
Программно-аппаратный комплекс для изучения методов оптической навигации в помещении (indoor SLAM)
Стоимость указана без НДС.
Предложение не является публичной офертой.
В данном модуле решается задача построения карты местности в незнакомом помещении по изображению с камеры (при поддержке или отсутствии дальномеров, опорных источников сигнала и т.п.) и дальнейшая навигация робота в рамках помещения.
Данный аппаратно-программный комплекс содержит в своем составе специализированное программное обеспечение, а также физический экземпляр объекта управления в виде малогабаритной самоходной платформы с установленной на борту камерой и набором дополнительных датчиков. Физический аппарат может осуществлять съемку местности с передачей видеосигнала на компьютер по беспроводному каналу связи для последующего анализа и обработки. В данном комплексе реализуются принципы работы с изображением на основе CV методов с навигацией по внешним меткам, а также освещаются базовые задачи работы с ROS системами с использованием виртуального окружения для отработки системы навигации c возможности отработки алгоритмов на реальном устройстве (роботе).
В качестве подвижного объекта выступает автономный роботизированный объект на подвижном основании, оснащенный оптическими камерами и дополнительными датчиками.
-
Учебная система позволяет отработать алгоритмы на виртуальной копии окружения, которая может быть перестроена с помощью встроенного редактора.
-
Виртуальный объект управления содержит эквивалентную имитацию физической камеры и датчиков, предназначенных для облегчения процесса калибровки алгоритмов, а также безопасности испытаний объекта.
-
Сигналы с виртуального набора сенсоров могут быть интерпретированы внешним ПО и использованы в рамках решения задач поиска или навигации.
-
Аналогично виртуальному окружению может быть изменена конфигурация лабиринта на физическом макете.
-
Полученный алгоритмы и отработанные параметры затем могут быть перенесены на реальный модельный объект для проведения испытаний.
Состав комплекса:
-
ПК с предустановленным ПО
-
Набор для возведения быстро-сборного лабиринта
-
Самоходный объект -робот с набортным мини-пк и комплектом датчиков
Габариты и вес комплекса (брутто):
-
Максимальные ДхШхВ(мм): 1000x1250x1000
-
Вес, кг: не более 40.
}} "Лабораторный комплекс «Моделирование и управление дорожным движением с помощью машинного обучения» ВИИ-ЛМУДД-01")
}} "Лабораторный комплекс «Распознавание и классификация объектов, контроль качества продукции с помощью технологий машинного обучения» ВИИ-РАКЛО-01")
}} "Лабораторный комплекс TensorUnity «Применение пакета TensorFlow в игровых задачах» ВИИ-ПРПИЗ-01")
}} "Виртуальная лаборатория изучения больших языковых моделей ВИИ-ВЛИЯМ-01")
}} "Программно-аппаратный комплекс "Отработка навигации и управления движущегося объекта вне помещения с использованием нейронных сетей" ВИИ-НАДВО-01")
}} "Лабораторный комплекс «Изучение методов самонаведения» ВИИ-ИМСМН-01")
}} "Виртуальный учебный комплекс "Прогнозирование характеристик и генерация параметров построения 3D модели лопастного винта с помощью нейронных сетей" ВИИ-ПХГПП-01")
}} "Лабораторный комплекс «Распознавание и классификация объектов с помощью сверточных нейронных сетей» ВИИ-РОСНС-01")
}} "Лабораторный комплекс «Визуальная обработка и управление движением с помощью машинного зрения и технологий ИИ» ВИИ-ВОУДИ-01")